






















Honda发布了全球首款※全新搭载了自律移动控制技术的类人型机器人“新型ASIMO”。“新型ASIMO”在自律性进一步提高的同时,可在无人操控的情况下连续活动。此外,在智能和身体方面,对环境的适应能力均有明显提升,这使得机器人在人类活动较多的公共区域、办公场所等环境下的实用化又向前迈进了一步。
Honda始终以“技术以人为本”作为创业精神,不断挑战新产品的创造与技术进步。在机器人研究领域,为实现“贡献人类、创造人类社会丰富多彩的生活”的梦想,Honda积极投身类人型机器人“ASIMO”的研发活动。
Honda将类人型机器人研究中获取的机器人技术和应用产品群总称为”Honda Robotics”。今后,在持续开展类人型机器人研发活动的同时,Honda也将积极地致力于相关技术在量产产品中的导入和运用,努力实现应用产品群的实用化。
基于上述想法,Honda此次还发布了“作业臂机器人”的试作机,运用了源自于ASIMO的多关节同时轨道控制技术与姿势控制技术、可在人类难以进入的危险场所及站立不稳的场所进行作业。
※Honda调查结果(截止至11月8日)
 |  |
| 标识 | 新型ASIMO |
■新型ASIMO
"新型ASIMO"可根据周围人的活动状况对自己的行动作出判断,而这一点则实现了机器人从"自动机器"到"自律机器"的进化。
Honda认为自律机器人需具备三大要素:①"姿态高度平衡"——突然迈步仍能保持姿态平稳;②"外界认知"——通过多个传感器将周围人的活动等变化状况进行综合分析和推断;③"产生自律行动"——根据已有信息进行预测,在无人操作的情况下自行判断下一步的行动。Honda定义了此三大要素的同时也开发出相应的技术。
上述能力的具备进一步推进了"新型ASIMO"在与人类共存的环境下的实用化进程。
1、智能提升
全新开发的智能化基础技术系统可根据类似人类视觉、听觉、触觉等各类传感器获取的信息进行综合判断,由此推断周围的状况并决定自身的对应行动。采用这一技术后,即使在一种活动进行过程中,也可根据对方的反映随时改变活动方式,使机器人的活动随时与人的活动、周围环境等相适应。同时,还可通过视觉与听觉传感器联动辨识人的脸部与声音,还可同时辨识多人的声音,而这一点即便是人类也很难做到。
此外,基于空间传感器提供的信息,可对数秒后人的行进方向进行预测。若发现与自身移动预测位置发生冲突,机器人将瞬间选择其他线路,确保行进时不与人相撞。
 |  |
| ASIMO中断了演讲并通知客人饮品已到 | |
 | ASIMO同时分辨3个人的讲话 |
| ASIMO预测行人的行走方向,调整步伐以免发生碰撞 |
2、身体协调性提升
全新控制技术可使机器人的腿部力量提升、腿部可动范围扩大,并能自由变换着地位置。引进该技术后,步行、奔跑、逆向奔跑、单腿跳跃、双腿跳跃等活动均可自由、连续地完成。敏捷性大幅提升,机器人即使在崎岖路面上仍可保持稳定姿势顺利行走,能够灵活应对外部的各种状况。
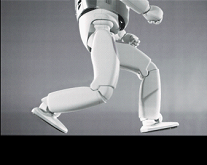 |  |
| ASIMO以时速9km奔跑时腿部的状态 | 双脚跳跃悬空的瞬间 |
 |  |
| ASIMO在崎岖路面上行走 | ASIMO单脚跳跃行走 |
3、作业性能提升
全新研发了高性能小型多指手,在手掌、五指中分别内置接触传感器与压力传感器后,便可对各节手指进行独立操控。“新型ASIMO”采用融合视觉与触觉的物体认知技术,可以进行握瓶、旋转瓶盖、握住装有液体的纸杯并保持其完好无损等灵巧的手部作业。此外,还能完成需复杂手指运动才可实现的手语表达。
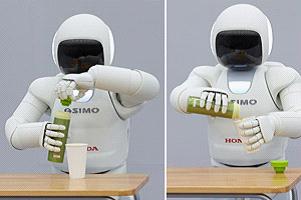 |  |
| ASIMO手握水壶、打开瓶盖、向杯中倒水 | ASIMO打出手语 |
主要规格
1.尺寸 | 长度 | 130cm | |
| 宽度 | 45cm | ||
| 深度 | 34cm | ||
| 重量 | 48kg(比上一代减轻6kg) | ||
| 2.性能 | 最大时速 | 时速9km(上一代时速6km) | |
| 活动时间 | 40分(步行时) ※通过自动充电可实现连续活动 | ||
| 3.关节自由度 | 头部 | 3 | 总计 57个关节(较上一代增加了23个) |
| 腕部 | 7×2 | ||
| 手部 | 12×2 | ||
| 腰部 | 2 | ||
| 腿部 | 6×2 | ||
■机器人技术与应用产品总称为"Honda Robotics"
知晓人、学习人、研究人是Honda制造产品的根本思想。Honda以类人型机器人研究作为其必要支柱之一,通过对最终极的智能移动文化——"人"的研究,将人的各种能力在机器人身上得以实现。
Honda将类人型机器人研究中获取的机器人技术与应用产品群统称为"Honda Robotics",并发布了新的标识。
除此次发布的"新型ASIMO"和"作业臂机器人"外,已发布的可辅助腿脚不便人群行走的"韵律助步机"、对人体部分体重进行支撑从而减轻腿部负担的"体重支撑型步行辅助器"、可向前后左右及斜线方向自由移动的小型单轮式个人移动工具"U3-X"等,均采用了ASIMO的双足步行技术及平衡控制技术。
今后,Honda将不断提出能够扩大移动喜悦与快乐的新一代移动工具,继续开展与"ASIMO"、"韵律助步机"、"U3-X"等相关的机器人技术的研发,并积极推进相关应用产品群的实用化。
| ||
| 标识 | ||
 |  |  |
| 韵律助步机 | 体重支撑型步行辅助器 | U3-X |
■作业臂机器人
“作业臂机器人”是运用ASIMO技术研发而成的试作机,可安装在自动行走式台架上,进入人工作业较为危险的场所及灾害现场,在站立不稳或障碍物较多的狭窄区域等环境中也可通过远程遥控操作靠近作业对象,开展稳定作业。
运用ASIMO在行走与跑步中所使用的稳定控制技术,即使在不稳定的场所亦能保持机器臂前端的稳定姿势,发挥出必要的作业力量。此外“作业臂机器人”还使用了ASIMO特有的紧凑布局构造设计技术,以及可同时控制安装在手脚关节中的57个电机的多关节同时轨道控制技术,在敷设管道等复杂、狭小的环境中亦能躲避各类障碍物并顺利靠近作业对象。
在开发阶段,“作业臂机器人”具备对管道阀门进行开关的功能,但通过更换前端的工具还可实现其他多种类型的作业。
主要规格
| 1、长度 2、宽度 3、深度 4、重量 5、关节自由度 | 1583mm(臂长) 338mm(底座部) 391mm(底座部) 29.5kg 10自由度(包括臂前段工具部分)
|
 | 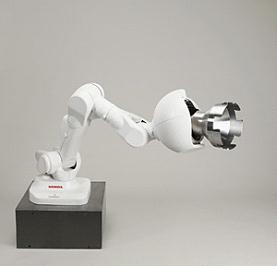 |
| 作业臂机器人① | 作业臂机器人② |
![]()
 上一篇
上一篇
 返回列表
返回列表





